Je suis en train de réaliser un boîtier de caméra étanche pour la mangrove. Ce boîtier sera imprimé en PETG et recouvert d’époxy et de gel coat. Il sera équipé de la nouvelle caméra HQ-Cam pour raspberry Pi et permettra l’utilisation de plusieurs objectifs.
Je vais en profiter pour ajouter des capteurs supplémentaires avec la caméra et tester une alimentation sur batterie pi-juice avec panneau solaire
Étape 0 : le fond du boîtier
Comme d’habitude, j’utilise le logiciel libre de modélisation paramétrique Freecad

Le haut du boîtier sera fermé avec un joint : je vais simplement mettre du ninjaflex. Un unique connecteur étanche, permettra de brancher le panneau solaire et une batterie externe additionnelle.
Deux queues d’arronde serviront à fixer le support de la caméra. j’ai prévu différents inserts dessous et derrière afin de pouvoir y visser des éléments supplémentaires (support de trépied, box pour batterie additionnelle ….)
Sur le flan gauche j’ai ajouté un élément de charnière qui me permettra de faire un support orientable pour la caméra
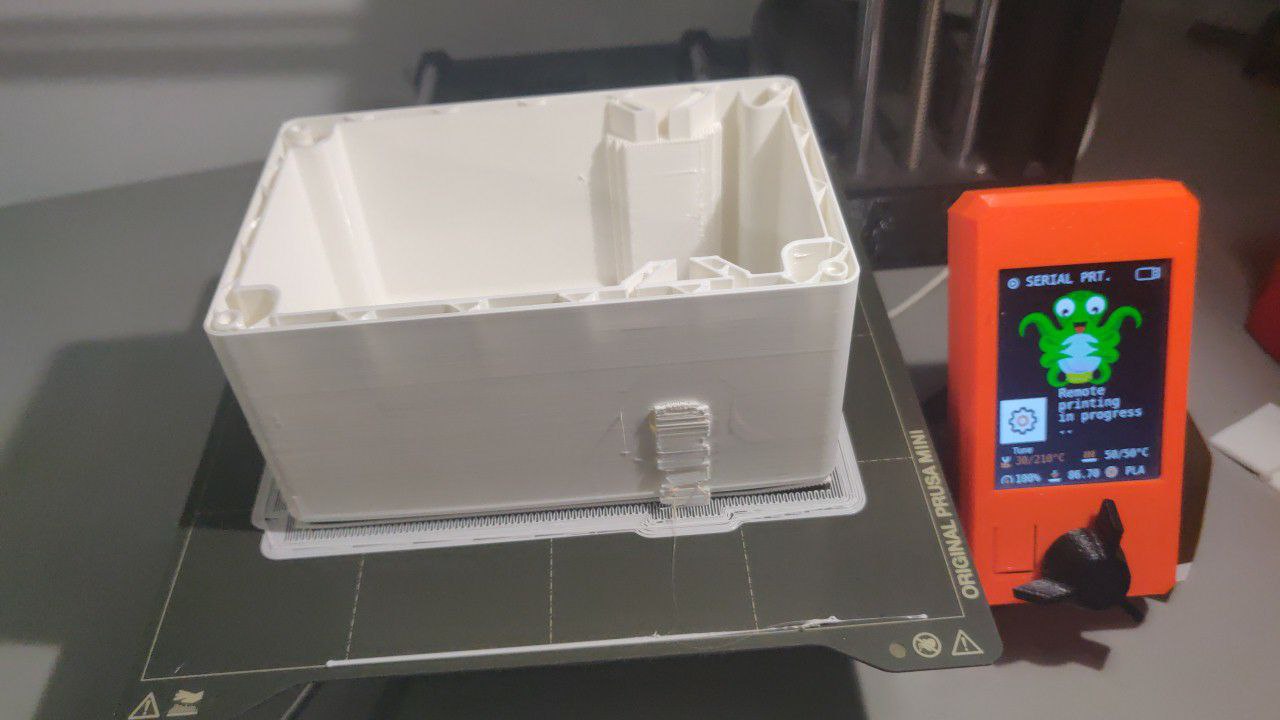
Étape 1 : l’impression du proto de fond du boîtier
Le boîtier final sera imprimé en PETG et enduit de résine epoxy et de gel coat pour l’étanchéité. J’imprime les protos en PLA, avec 0.5% de remplissage et en mode draft.

Sur la Prusa mini, c’est du 250 microns, ce qui avec les supports me fait tout de même une impression de 8h41 !

Étape 2 : impression du boîtier
J’ai utilisé une fin de bobine —à la louche j’ai estimé que on était pas loin des 140g requis− mais évidemment il en manquait un peu.
Octoprint et la détection de fin de filament
J’utilise Octoprint, ce qui me permet d’envoyer mon gcode via le réseau et de réaliser des timelapse de mes impressions. Hélas, si Octoprint a bien reçu le message de fin de filament de la Prusa, il n’a pas réussi à dialoguer avec la Prusa pour changer le filament et reprendre l’impression
Il faudra que je me penche là-dessus. Ami(e) lecteur/lectrice, si tu connais un plugin ou un paramétrage répondant à ce problème, n’hésite pas à me laisser un commentaire !
Un prototype utilisable
Ceci-dit, ce n’est pas bien grave : le prototype est tout à fait utilisable pour mesurer l’encombrement des éléments : il ne manque que 2 mm en haut du boîtier

Étape 3 : test du boîtier
L’objectif de ce prototype était de valider ses dimensions par rapport au éléments qu’il devra contenir
Dimensions du support raspi et profondeur du boîtier validés

Il a fallu prévoir un boîtier très profond car il doit accueillir un empilement avec un raspberry pi 4, une carte pi-juice avec batterie et une carte RLIEH pour les connecteurs embarqués, avec de l’espace pour brancher les capteurs sur les connecteurs : je prévoie au minimum un détecteur de mouvement PIR en façade sur le couvercle, comme celui que j’avais utilisé pour la trap-cam que j’avais faite pendant le 1er confinement.
Sans oublier au-dessus, l’espace pour la caméra HQ-Cam et son support.

Espace connecteur étanche externe
Il faudra sans doute surélever légèrement le connecteur externe, afin d’avoir suffisament d’espace pour ses fils à l’intérieur du boîtier

Prochaine étape : le support de caméra
Pour faire mes tests et ne pas risquer d’abîmer la caméra lors des manipulations, j’ai imprimé un gabarit de HQ-Cam !

L’aventure continue …
je publie régulièrement des nouvelles de mes projets en cours sur les réseaux sociaux, n’hésitez pas suivre Mr Hackquarium ^^
@ suivre
Bonjour, et merci pour ces conseils.
Je me pose la question du refroidissement du raspberry… dans un boîtier rendu totalement étanche.
Cordialement,
Salut, c clair que.cette camera HQ + Pi4 chauffe plus que le modèle en Pi2 ou 3 + raspicam : https://mr-hack.com/raspberry-pi-picam-pir-sensor-python-trap-cam-diy/
Ceci-dit, dans nos tests ce qui a fait la différence en terme de chaleur (et de conso), c’est la pile logicielle. Typiquement avec un Home assistant, ça chauffe, tandis qu’avec qq démons pyton, ça passe.
Autre facteur à prendre en compte : l’alim. Sur les 1ers modèles on est parti sur une batterie dans le boîtier, sur les nouveaux on part sur une batterie à l’extérieur (dans un second boîtier).
À suivre